Body of My Body
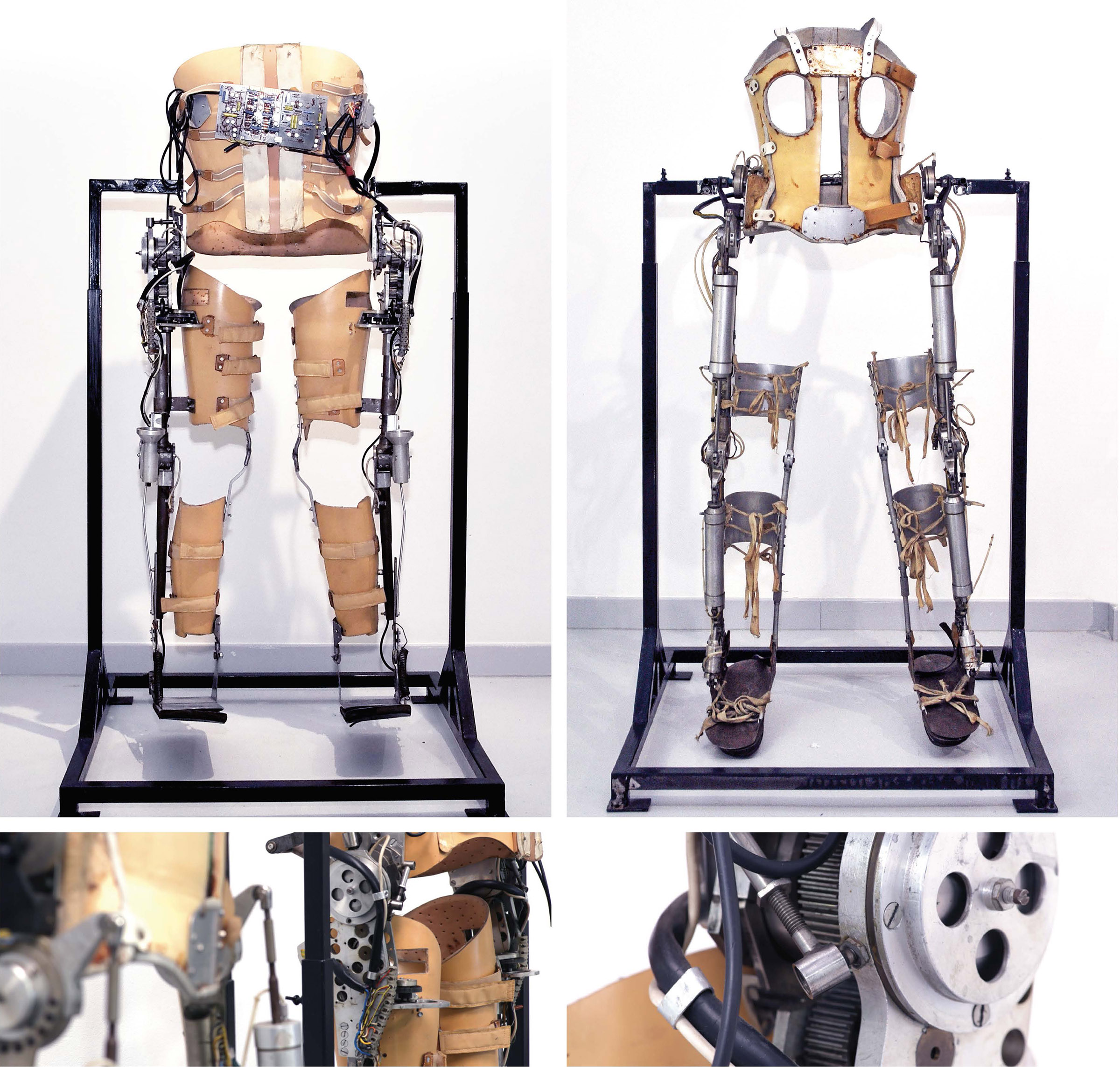
Exoskeletons
Manufacturer: Institute Mihajlo Pupin
Place and time of production: Belgrade, SFRY, 1972 and 1974
Dimensions (cm): 30. 60. 150
Inventory number: Т:91.4, Т:91.5
In late 1960s, Robotics Laboratory of the Institute Mihajlo Pupin began pioneering work on the development of active exoskeletons, which was the first step in the development of humanoid robotics. During 1969, they developed the first in the world active exoskeleton for anthropomorphic walk. It restored 50% of power necessary for walking to persons suffering from paraplegy. The device was tested in several medical institutions in the country and abroad. The most successful version of the active exoskeleton, pneumatically powered and computer-programmed, was tested at the Clinic for Orthopaedic Surgery and Traumatology in Belgrade in 1972. Active exoskeleton with electromechanical engines was constructed and tested in 1974. It was the first exoskeleton in the world that used electric motors as actuators and it can be considered a precursor of modern humanoid robots.
Professor Miomir Vukobratović, long-term Head of the Robotics Laboratory, is the creator of Zero Moment Point — ZMP theory, which solved the problem of walk for bipedal robots (humanoids). The theory was named after a point in the foot in which the resulting moment of all forces equals zero. Vukobratović’s theory was first applied in 1984 on a bipedal robot WL 12, at the Waseda University in Japan.
Since 1975, the activities at the Robotics Laboratory at the Institute Mihajlo Pupin have been directed towards the field of industrial robotics.